機械情報工学科
安 鍾賢
教員紹介
プロフィール
- 【専門分野】
-
○フィールドロボティクス
○インテリジェントセンシング
- 【担当科目】
- センサー工学 、 アクチュエーター工学 、 ロボット基礎工学 、 ロボット運動制御
- 【研究テーマ】
-
1.水中、屋外などの環境で行動するロボットの研究開発
2.環境変化にロバストなロボット視覚システムの研究開発
3.環境地図生成システムの研究開発
- 【ひとこと】
ロボットを設計・製作し実環境で役割を果たすことをみるのはとても楽しい経験です。興味がある人は一緒にロボットの研究開発をしましょう!
研究紹介
安 鍾賢AHN Jonghyun
工学部 機械情報工学科 講師
海の謎を解明する、
⾃律型・海中探査ロボットを開発せよ!

PROLOGUE
地球の表面積の約7割を占める海。その中には、まだまだ⽣態の解明されていない生物もいれば、数々の鉱物・エネルギー資源も眠っています。また海の環境は絶えず変化しており、「以前はほとんど見かけなかったのに、最近はクラゲが群れで大発生するので漁業に支障がでる」といった問題が起こることもあります。 こうした"海の謎"を探求し、問題を解決しようとしているのが安先⽣。先⽣は学⽣とともに、「海中を⾃律型で探査して回るロボット」の開発を⼿がけています。
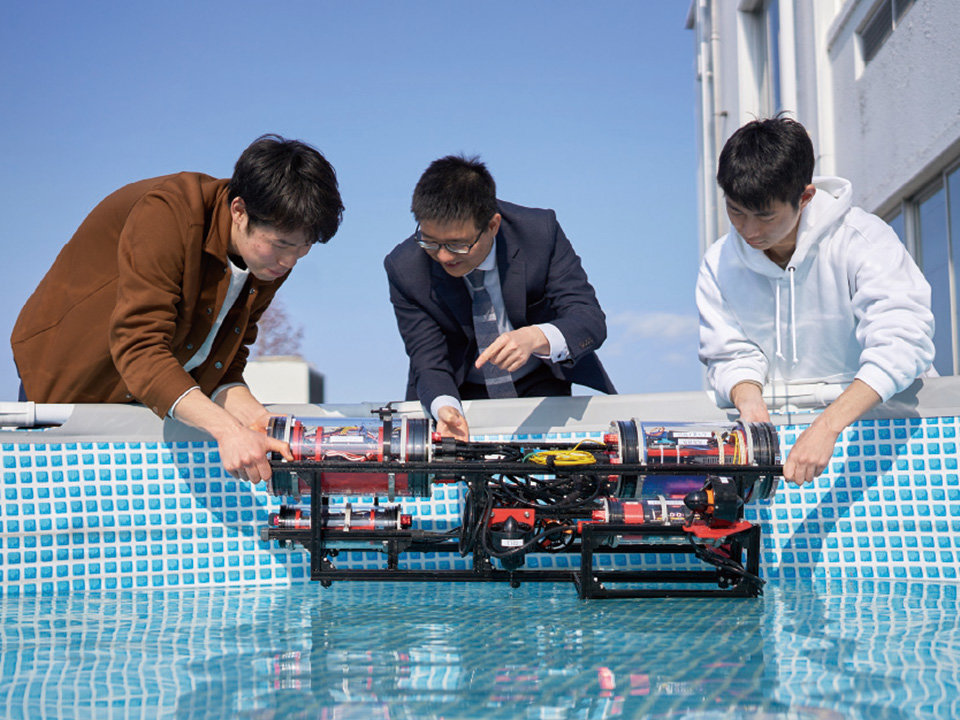
海中を⾃律的に動き回り、2~3時間の連続潜航が可能。
右の写真をご覧ください。これが私のゼミで開発している「⾃律型・⽔中探査ロボット」(AUV=Autonomous Underwater Vehicle/自律型無人潜水機)です。ステンレスの骨組みに4つのスラスターが付き、そのスクリューによって前進・後退、⽅向転換を行います。周囲を撮影するためのカメラや、海中で環境計測や障害物を確認するためのソナーも装着。リチウムイオンバッテリーで2〜3時間の連続動作が可能です。
骨組みが支えるアクリルの円筒内には、ハードウェアの制御を行う電子基板を設置。基板内に組み込まれたプログラムにより、自律的に行動するのです。このシステム設計やプログラミングも学生と⼀緒に行っています。
海中の調査を⼈⼒で⾏うのは⼤変です。⼈間が潜れる深さには限界がありますし、⻑時間の活動はできません。しかしロボットなら、広範囲を⻑時間調査することが可能です。
私はかつて、2000mの深海調査が可能な海中ロボットシステムの開発に携わっていました。その経験を活かし、大学の前に広がる瀬⼾内海をロボットで探査したいと考えています。
程度のコンパクトなサイズです。
GPSの使えない海中でも、位置が推定できる。
瀬戸内海の水深は50m程度ですが、それでも水圧の克服は簡単にいきません。装備品やケーブルと筐体とは厳重にガードしておかないと浸水してしまうし、サビ・腐食の予防も大事です。
海中ロボットと陸上ロボットの最も大きな違いが「通信手段が限られる」という点でしょう。GPSの使えない海中では、位置情報が取得できません。そこで潜航前に位置情報をロボットに取得させ、海中活動の基準点とするのです。潜航後は、内蔵の加速度センサなどを利用し、基準点からどの方向に何m移動したか計測します。そうすれば、海中で自律的に動くロボットが、今どの位置にいるか推定できるわけです。
進行方向に障害物があった場合、ロボットはソナーなどで感知し、深度を上げるなどして回避します。これらは全て、事前に組み込まれたプログラムに従った行動です。ロボットを海上からリアルタイムに操作できるわけではないため、事前の準備・予測がとても重要になってきます。
クラゲ除去装置の開発に着手。スマート漁業の実現にも貢献したい。
AUV研究を行っている大学生が集って、互いの技術を競う、水中ロボットフェスティバル(水中ロボフェス)という大会があります。私たち広島工大チームは2019年大会に初参加。そして、東京や大阪を拠点とする常連の強豪校がしのぎを削る中、初優勝の快挙を成し遂げたのです。この成果は、広島という地方都市にあっても、最先端のロボット開発はできる。独自の技術があれば、全国レベルの研究者と対等に渡り合えることを示してくれました。
最近はAUVの別の活用法についても研究しています。今、取り組んでいるのは、大量発生して漁業に深刻なダメージをもたらすクラゲの駆除装置です。AUVに取り付けたアタッチメントで浮遊するクラゲを吸引し、機器内部で粉砕する仕組みを試作しました。クラゲによっては体長2mに及ぶ巨大なものもいるので、チェーンソーみたいな「手」をロボットに装着し、分解して吸引する仕組みも必要かもしれません。
瀬⼾内海は漁業や交通の要所として、古くから⼈々に知られた海です。しかし海の環境は、常に変わります。気候や海流によって海洋⽣物の⽣育・回遊状態は異なりますし、海底の地形もどんどん変化します。身近な海だからこそ、丹念に調べる必要があるのです。これらの研究成果が、より効率的に成果を挙げられるスマート漁業の実現につながるのではないでしょうか。
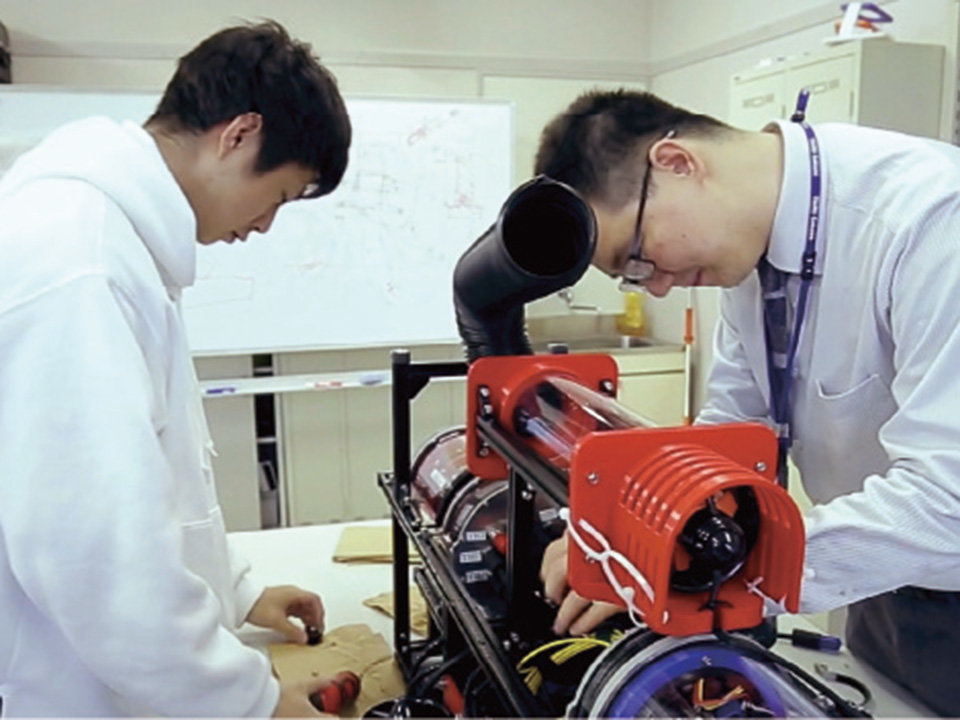
クラゲを吸引して駆除します。
今はゼリーを使って試験中です。
水中ロボットフェスティバルで、
初参加ながら優勝しました。
