屋内ロボットのコスト削減と、建物維持管理の進化に寄与する、世界初のBPS開発に成功
2022.09.07
このニュースは、クローズされました
本学の「建築保全業務ロボット研究センター」は、BIM・センサ・ロボットの三位一体による、建物内の自己位置推定技術(Building Positioning System=BPS)の開発に成功。マスコミやロボットメーカー、建築関係者などが集まる中、同システムのデモンストレーションが実施されました。

BPS開発に関わった教員と学生たち

世界発のBPSは学科を超えた協力で実現しました
屋外ではGPSで自分の位置を特定できますが、衛星信号の届かない屋内での位置情報の把握は困難です。
「屋内で稼働するロボットには独自に位置測定システムを装備する必要があり、それだけで製造コストの半分を占めています。建物側にセンサを設置すれば、ロボットにシステムを持たせなくてよくなり、コストが大幅に抑えられると感じました」
と語るのは、同センターのセンター長を務める建築デザイン学科の杉田洋教授です。

建物側とデータをやり取りしながら、ロボットがフロア内を自律走行

プロジェクトを主導する杉田洋教授
BPSを実現するため、UWBという無線通信を採用。フロア四隅に設置されたUWBのアンカーと通信を行うことで、お掃除ロボットは自分の現在位置を把握しながら走行します。そしてロボットは、その場所の情報をホストコンピュータに送信します。
ホストコンピュータ側では、BIM(Building Information Modeling)の情報を基に、走行フロアの3次元モデルを表示。そこに、ロボットから送られた情報を収集していきます。
BIMとは、コンピュータ上で現実の建物と同じモデルを再現するシステムで、設計・建築・施工の全工程で活用されます。単にモデルを作るだけでなく、建物を構成する部材の一つひとつの属性情報まで持たせているのが大きな特長です。
お掃除ロボットはBIM情報を受け取り、そこの素材や形状まで正確に把握しながら、業務を遂行できるわけです。一方、お掃除ロボットが収集した汚れ・劣化などの情報は、ホストのBIMにストックされ、効率的なメンテナンス計画の立案に利用されます。

フロアに設置されたUWBアンカーにより、ロボットは自己位置を特定します
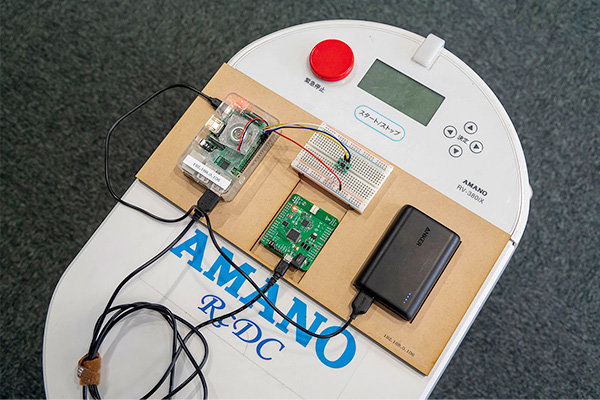
ロボットに搭載された通信・制御用のボードコンピュータ
UWBアンカーとロボット、そしてホストコンピュータが通信・情報共有するシステムの構築に関わった情報工学科・大谷教授は、
「建物側に最低3つのアンカーがあれば、ロボットは位置を算出します。またロボットに複数のセンサを搭載することで、空気環境や温湿度などさまざまなデータを収集できるため、建物メンテナンスのやり方を大きく変えると思います」と話します。
BIMとの連携を担当した建築デザイン学科・杉田宗准教授は、
「屋内稼働型ロボットには掃除、警備、配送・配膳用などさまざまなタイプがあります。BPSがそれぞれを稼働させるプラットフォームになるわけです。各ロボットが収集した情報をBIMにストックすれば、建物の利用法やメンテナンスの質がアップし、建物の資産価値向上にも貢献するでしょう」と語ります。
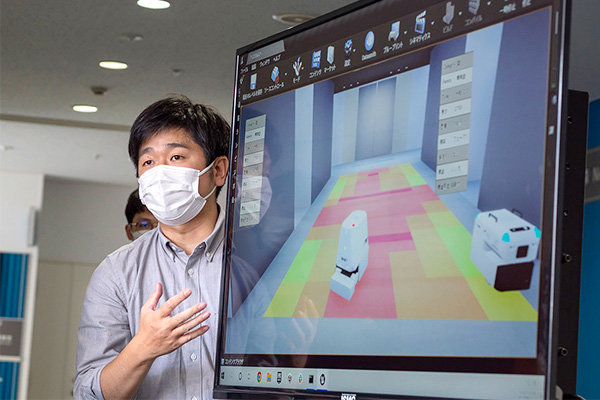
ロボットが取得した汚れなどの情報をBIMに取り込み、リアルタイムで表示

各ゼミの学生たちも、システムの構築に尽力
オープンなシステムとして広く利用してもらいたいため、敢えて特許なども取得していません。
「BPS実装により、建築分野におけるデジタルツインの実現がさらに進むでしょう。メーカーと協働して研究を進め、1~2年で次のステージに持っていきたい」
と杉田洋教授は意欲的です。

大勢のマスコミや業界関係者が集まり、デモンストレーションに注目していました
多様なロボットが屋内を駆け巡り、日常をもっと豊かなものにしてくれる。そんな日が間近であることを感じさせるデモンストレーションでした。
BPS研究の今後の進展にご注目ください。
※新型コロナウイルス感染症対策を講じ、取材・撮影を行っています。